PWM-Modul : Dimmen von LEDs und Ansteuern von Motoren
17.12.2015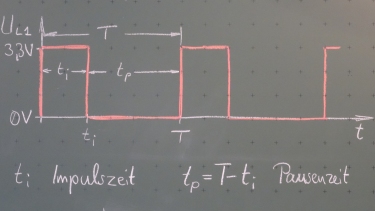

Aufgabe 1 Dimmmen einer LED
Die LED L7 und L1+L3+L5 sollen mit einer PWM-Spannung in 3 Abstufungen dimmbar sein.
- Welche maximale Periodendauer ist möglich, ohne das unser Auge ein Blinken wahrnimmt?
- Wähle drei geeignete Impulszeiten.
- Erstelle das Projekt 10-PWM und schreibe die Datei 10-PWM-1-LED-dimmen.c, in der die Helligkeit von den LEDs eingestellt werden kann.
- Mit dem Taster
SUundSDsoll die Helligkeit der LED L7 geändert werden können. Nutze die Variablenti,Tund die Funktionvoid DelayMS(unsigned int zeit).
Zur Verwendung des PWM-Moduls wird eine Bibliothek zur Verfügung gestellt. Binde dafür die Datei PWMconfig.h und PWMconfig.c in das Projekt ein.
- Wie lange ist die Periodendauer für
PTPER=1undPTPER=1000? - Mit dem Taster
SRundSLsoll die Helligkeit der LEDs L1+L3+L5 mit dem PWM-Modul geändert werden. Verwende hierfür das PWM-Modul. Hinweis: Bei der Aktivierung des PWM-Moduls werden automatisch alle drei LEDs aktiviert.
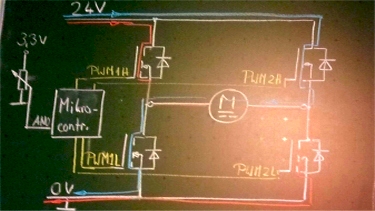
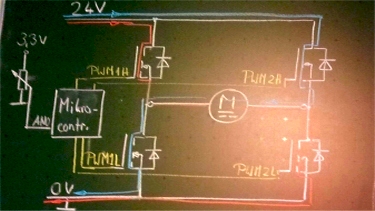
Aufgabe 2 Drehzahlsteuerung | DC-Motor
Eine Gleichstrommaschine wird mit der integrierten H-Brücke angesteuert. Zur Verwendung des PWM-Moduls benötigst du die
Bibliotheksdateien PWMconfig.h und PWMconfig.c, musst die 24 V am Board aktivieren und
PWM_EN=1; im Quelltext setzten.
- Erstelle die Datei 10-PWM-2-Drehzahlsteuerung.c, in der mit Hilfe des PWM-Moduls die Drehzahl eines DC-Motors in 10 Stufen gesteuert wird.
- Binde alle notwendigen Bibliotheken ein.
- Deklariere 2 Arrays für die LCD-Anzeige.
- Setze die Impulszeit in Abhängigkeit von
SUundSD. Pro Tastendruck soll sich die Drehzahl um 10 % ändern. - Aktualisiere nach jedem Durchlauf die Tastgradanzeige am LCD.
Aufgabe 3 Drehrichtungsänderung | DC-Motor
Programmiere eine Drehzahlsteuerung mit Poti 1 und Drehrichtungsauswahl in der Datei
10-PWM-3-Drehrichtungsaenderung.c. Binde alle notwendigen Bibliotheken ein und lies die Impulsdauer am Poti mit
ti = ADCread(Poti1); ein. Begrenze den Wert auf 1000 oder ändere entsprechend die Periodendauer ab.
Die Drehrichtung kann mit SU und SD geändert werden und am LCD wird die Drehrichtung und
der Tastgrad angezeigt.
Aufgabe 4 Drehzahlregelung | DC-Motor
Das analoge Signal (0 - 10 V) des Tachognerators wird am externen analogen Eingang EXT1 eingelesen und so die Drehzahl des DC-Motors geregelt.
- Erstelle die Datei 10-PWM-4-Drehzahlregelung.c. Binde alle notwendigen Bibliotheken mit ein: LIMExconfig, LCDconfig, ADCconfig, PWMconfig
- Erfasse den Sollwert mit dem Poti1:
sollwert = ADCread(Poti1);und begrenze ihn auf 936. - Erfasse den Istwert des Tachogenerators:
istwert = ADCread(EXT1);und multipliziere ihn mit 4. - Programmiere die Regelung.
Hinweis: Falls der Sollwert größer als der Istwert ist, erhöhe die Impulszeit um 5, aber maximal auf 1000. Andernfalls verringere die Impulszeit um 5, aber minimal auf Null.
Aufgabe 5 Abstandssensor | DC-Motor

Lese in 10-PWM-5-Abstandssensor.c den Abstand mit einem Abstandssensor ein. Ist der Abstand bspw. kleiner als 50 cm soll der Motor sofort stehen bleiben. Alternativ können auch andere Sensoren wie Kontaktschalter oder Lichtschranken eingesetzt werden.