Encoder-Modul : Drehzahlmessung und Positionierung
17.12.2015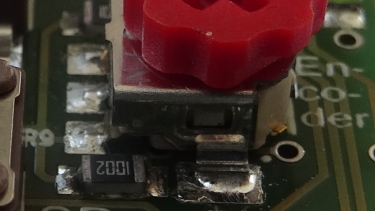
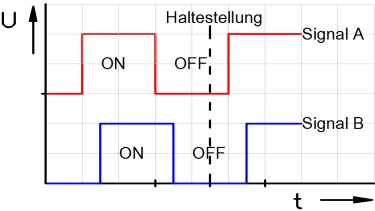
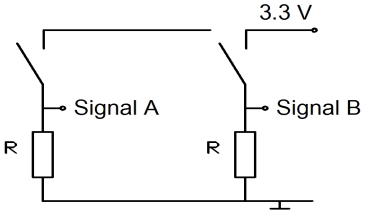

Aufgabe 1 Manuelle Auswertung des Inkrementalgebers
Programmiere manuell den Encoder und zeige die aktuelle Position am LCD an.
- Erstelle das Projekt 12-QEI und schreibe die Datei 12-QEI-1.c, in der die aktuelle Position ermittelt wird.
- Funktioniert das Programm auch mit den Tastern
SUundSD?
Aufgabe 2 Encoder-Modul QEI

Der Alps-Encoder EC05E wird mit dem Encoder-Modul ausgewertet. Zur Verwendung des Encoder-Moduls benötigst du die Bibliotheksdateien QEIconfig.h und QEIconfig.c.
- Erstelle die Datei 11-QEI-2.c, in der mit Hilfe des Encoder-Moduls die Position des Inkrementalgebers erfasst wird.
- Binde alle notwendigen Bibliotheken ein.
- Speicher den aktuellen Wert auf einer Variable und gib diesen am LCD mit der Funktion
sprintf(...)aus. - Teste die Funktion auch mit den Tastern
SUundSD. Welche Tastenkombination ist zum zählen notwendig?
© mylime.info